
Glossary¶
- acceleration feed forward
- When acceleration feed-forward is enabled, any abrupt changes in the target acceleration will immediatly create a change in the PID output. The acceleration feed forward term is directly multiplied to the target acceleration and added to the output of the PID loop.
- actual position
- The actual position is the position the motor is currently at. The actual position is calculated from the encoder input. however, it differs in the encoder count in that it will continuously count up or down.
- actual velocity
- The actual velocity is the velocity the motor is currently at. The actual velocity is calculated from the encoder input over time.
- advanced encryption standard (AES)
- AES-256 is used to encrypt all communications to and from the PiMotion™ device (excluding some data acquisition channels). AES-256 is an extremely secure form of encription. See the Wikipedia entry Advanced Encryption Standard for a detailed description.
- closed loop
- See feedback loop
- encoder count
- Encoder counts referes to the number of lines on the encoder wheel multiplied by four. Since the encoder optics measures both the rising edge and falling edge from two out of phase locations, four counts are produced for every line on the encoder. For example, a 512 line encoder will generate 2048 counts per rotation.
- feedback loop
- A Feedback loop with the PiMotion™ motion controller is created when the motor drive current and direction are determined by the combination of the target position and the actual position. In most cases the position input is an encoder.
- linear amplifier
- Linear amplifiers in motion control provide a clean sinusoidal waveform at the output of the amplifier. The linear amplifier can produce very precise motion with minimal electrical and acoustic noise typical with PWM (pulse-width modulated) amplifiers .
- poles
- The number of poles is the number of sets of electromagnetic windings that a motor has.
- position error
- The position error is the difference from the actual position and the target position is calculated from position error = target position - actual position.
- PWM
- Pulse-width modulated
- quadrature
- The two output signals from the encoder are 90 degrees out of phase of each other. The signals are decoded to produce a count up or down.
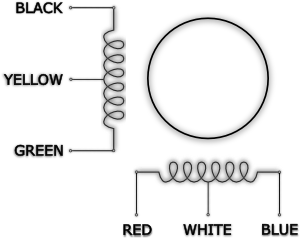
- stepper motor
Unipolar with 6 leads.
- target position
- The target position is the position which the motion controller is attempting to achieve. See position error
- target velocity
- The target velocity is the velocity which the motion controller is attempting to achieve. See velocity error
- trapezoidal profile
- work
- velocity error
- The velocity error is the difference from the actual velocity and the target velocity is calculated from velocity error = target velocity - actual velocity.
- velocity feed forward
- When velocity feed-forward is enabled, any abrupt changes in the target velocity will immediatly create a change in the PID output. The velocity feed forward term is directly multiplied to the target velocity and added to the output of the PID loop.
- velocity profile
- A velocity profile calculates the error based on the difference from the target velocity and the actual velocity.